モータドライバ制御マイコンのファームウェア書き込み方法
このページでは2017年モデルの設計資料を紹介します
モータドライバ制御用マイコンにはdsPICを使用しています。
1. MicrochipのサイトでMPLAB Xを入手する
- Microchipsiteに移動する
-
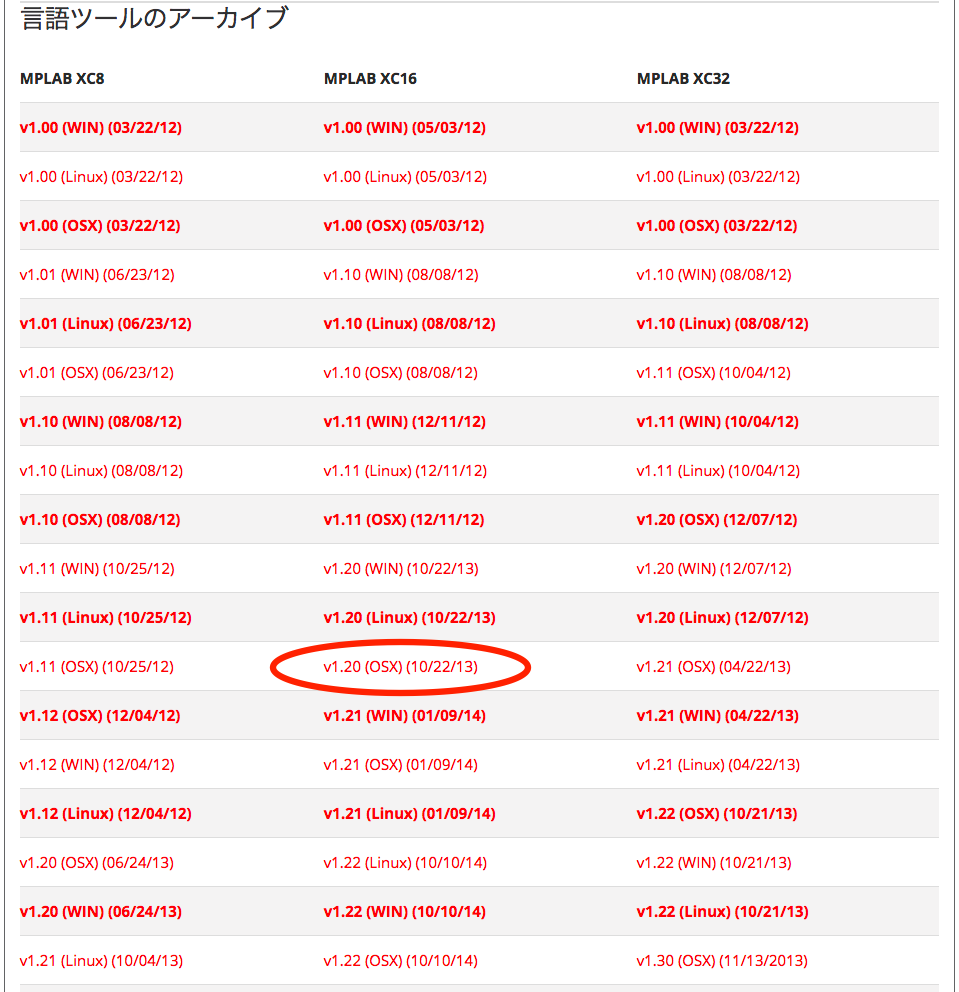
"アーカイブのダウンロード”Tabをクリック。

-
使用しているOSにあったMPLAB Xをダウンロード ※’17/7/25時点 MacOSのMPLABXv2.20 をダウンロード

-
ダウンロードしたインストーラを起動※Java(tm)がないと言われたら番外編へ
- "I accept the agreement"にチェックといれ、"Next"ボタンをクリックし、インストールを進める。
2. Microchipのサイトに行き、XCコンパイラを入手する。
- 右記URLに移動する。 XC_Compiler
-
"アーカイブのダウンロード”Tabをクリック。

-
使用しているOSにあったXC16コンパイラをダウンロード ※’17/7/25時点 MacOSのXC16 v1.22をダウンロード
-
ダウンロードしたインストーラを起動
-
"I accept the agreement"にチェックといれ、"Next"ボタンをクリックし、インストールを進める。
-
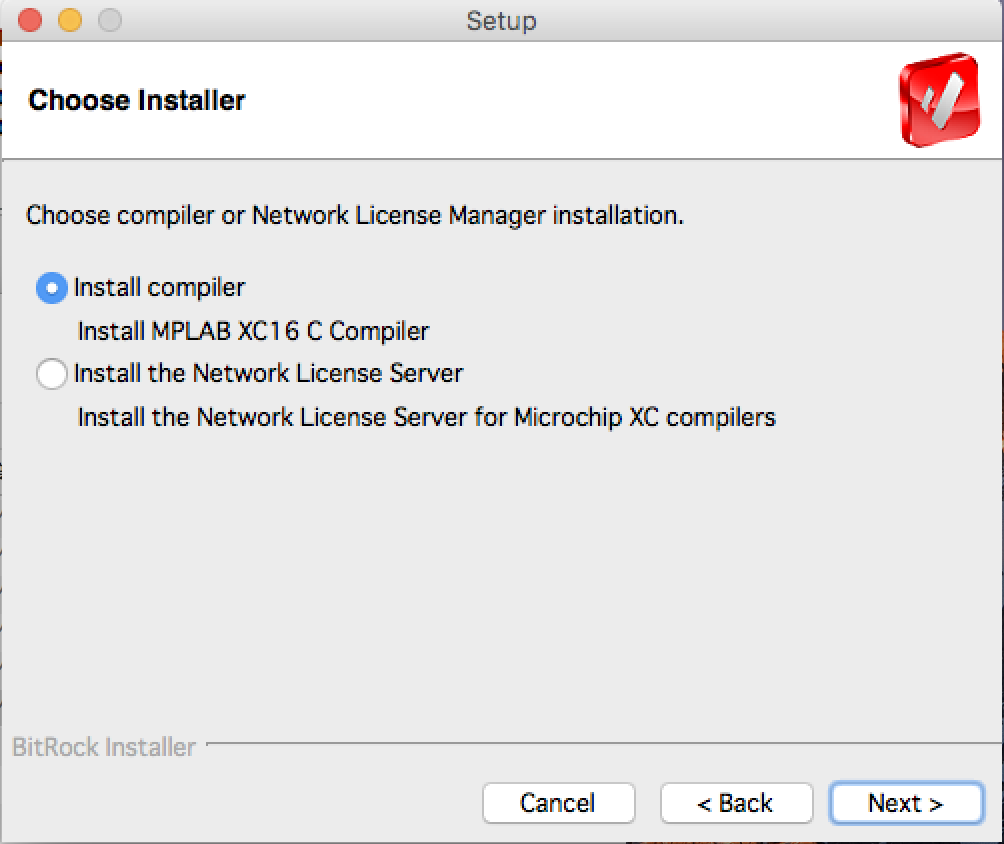
”install compiler”を選択。
-
"Installation type"ページはそのままで次へ。
-
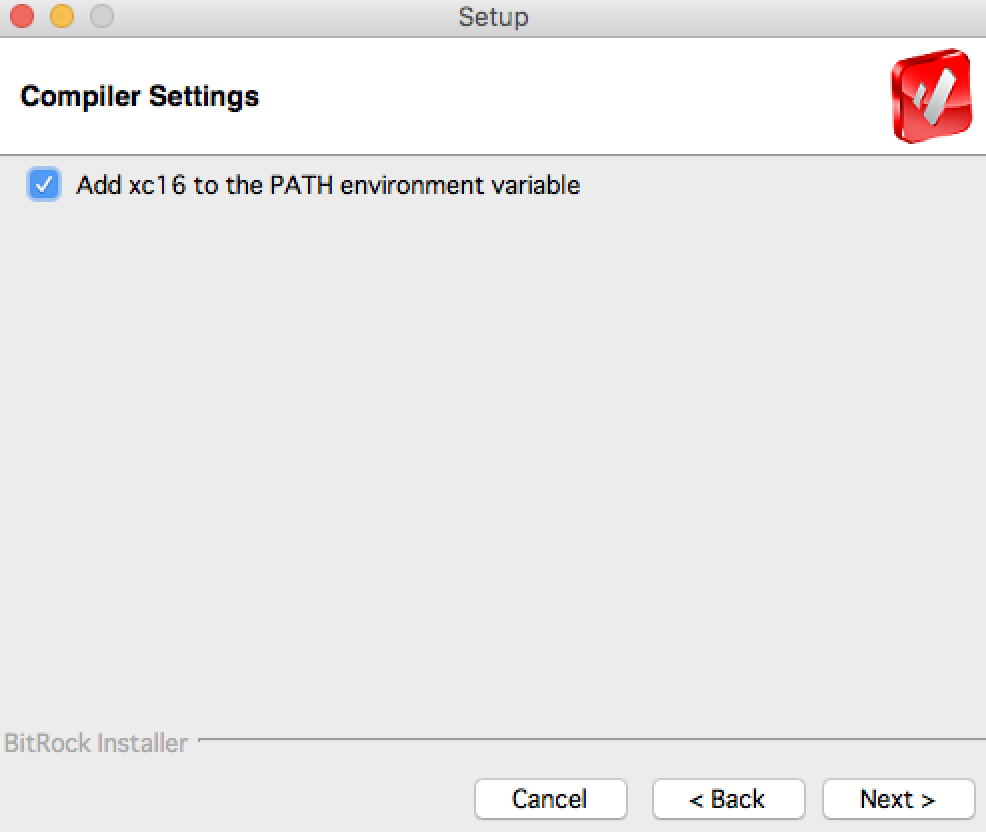
環境変数を追加するためにチェックを入れる。
3. プログラムをダウンロードする。
- 右記サイトに移動する。MotorDriver
-
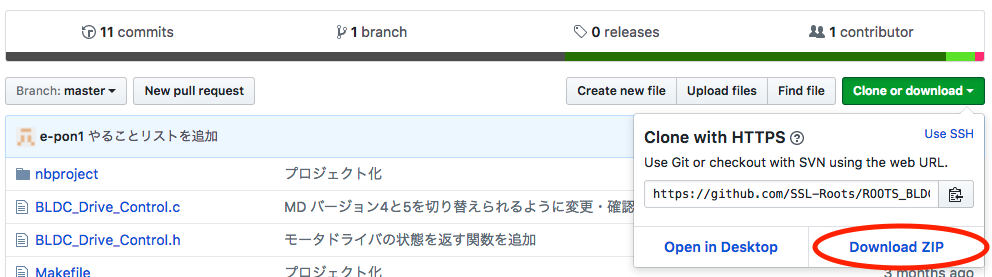
”clone or download”ボタンをクリック。

-
"Download ZIP”ボタンをクリック。
-
ダウンロードしたZIPファイルを解凍する。
4. MPLABXでプログラムを開く。
- MPLABXを起動する。
-
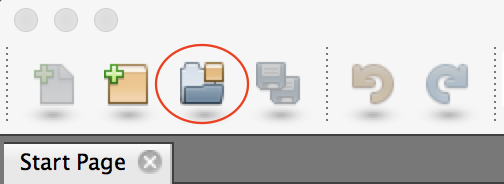
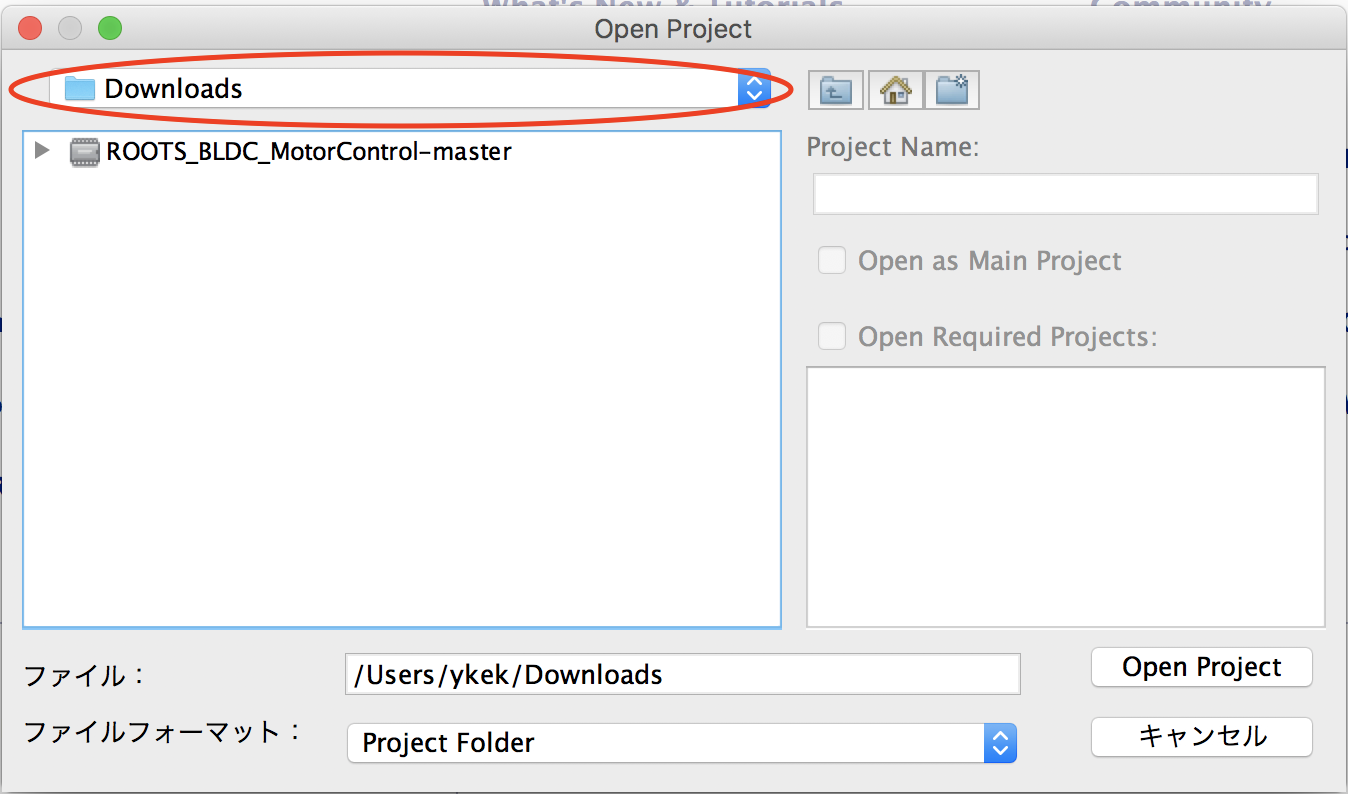
”Open Project”ボタンをクリックする。
-
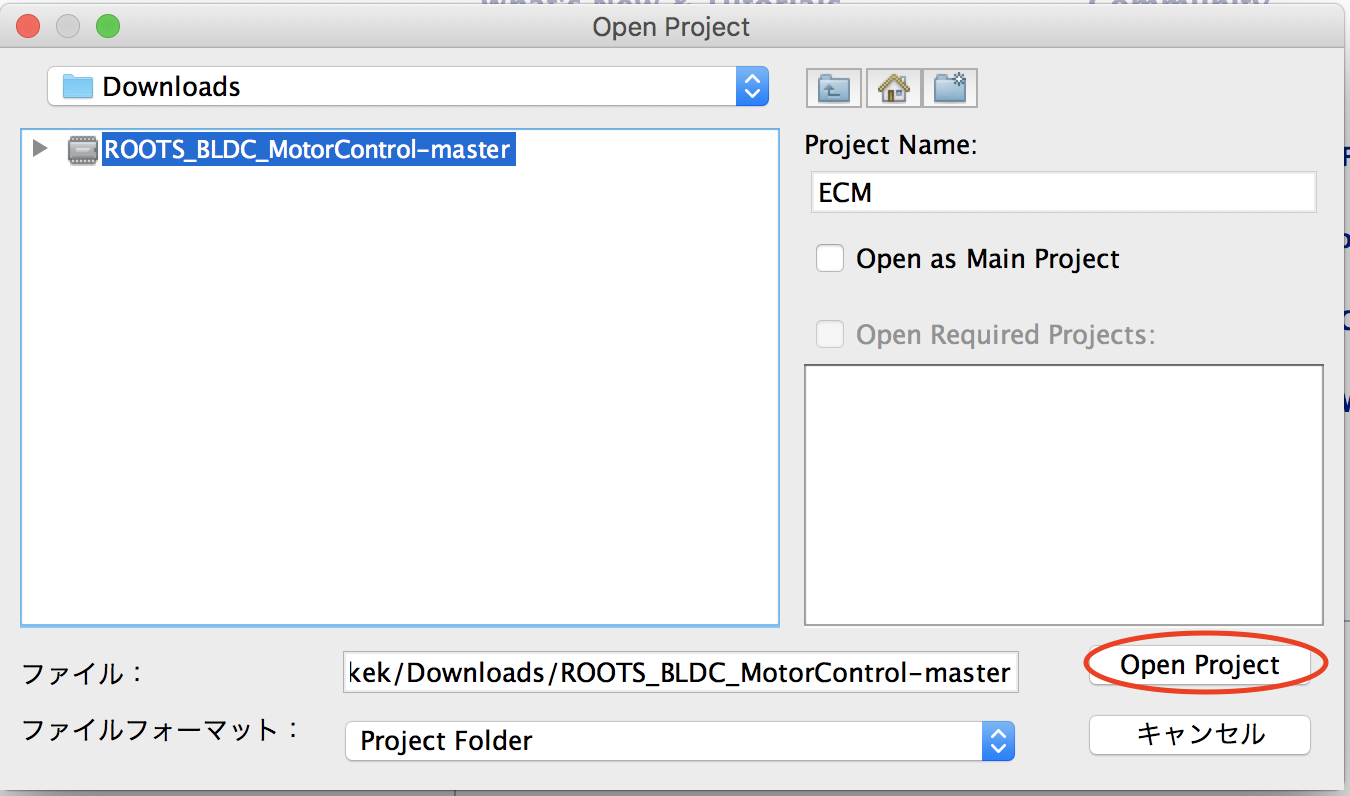
ダウンロードしたプログラムを解凍したディレクトリに移動する。
-
"Open”ボタンをクリック。
5. プログラムをビルドする。
-
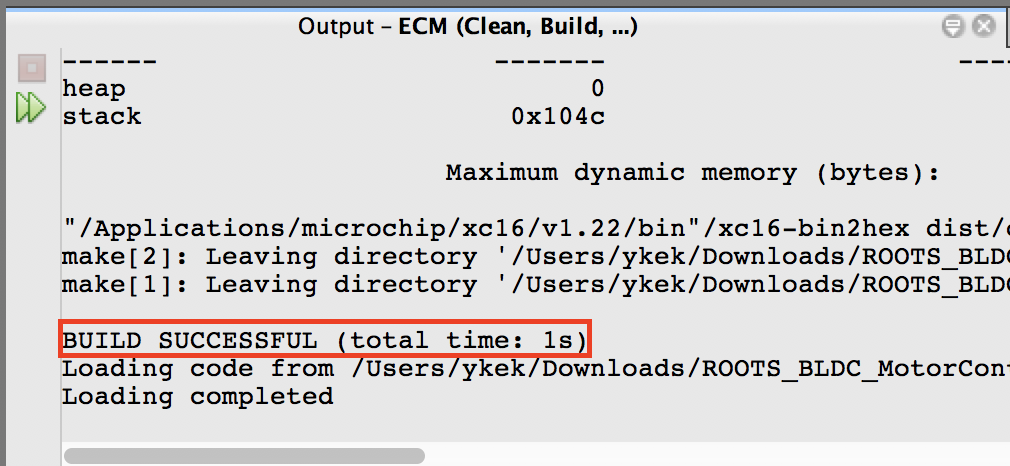
”Clean and Build Project"ボタンをクリック。

-
”Output”Tabに”BUILD SUCCESSFUL”と出力されれば、ビルド完了。
6. プログラムを書き込む。
- Pickit3とMDを以下のように接続する。
画像準備中です
- "Make and Program Device"ボタンをクリック。

番外編:インストール時Java(tm)がないと怒られた場合
- Javaダウンロードサイトに移動する。Java:JRE
- ”ダウンロード”ボタンをクリック。
- ダウンロードしたインストーラを起動し、インストールする。